Swap the Payload, Not the Robot
The dual-brain robot got the split right and the address wrong — and defense already showed us the fix.
In the span of a few weeks, three robots told the same story without realizing it.
In Shanghai, Jaka unveiled Pi — a compact 1.22-meter humanoid with what the company calls a “fusion brain.” The architecture splits intelligence cleanly: a cerebrum for reasoning, vision, language, and planning, and a cerebellum for deterministic, millisecond-latency motor control over EtherCAT. It’s a genuinely good idea. Then Jaka bolted both halves to the same 42-kilogram chassis.
In Taipei, NVIDIA introduced its first open humanoid reference design on the Isaac GR00T platform, built around a Unitree H2 and powered by a Jetson AGX Thor delivering 2,070 teraflops of onboard AI. Two thousand teraflops. On the robot.
And from Vietnam, Vin Robotics showed the VRH3 running two onboard edge computers — explicitly, in the company’s words, so it can process locally “instead of relying only on remote systems.”
Three robots, three labs, one shared reflex: when in doubt, put more brain on the body.
This is the orthodoxy of the humanoid race right now, and it feels self-evidently correct. Of course the robot should be smart. Of course intelligence should be local — latency, reliability, autonomy. Who wants a robot that stops thinking when the Wi-Fi drops?
But the orthodoxy is solving the wrong problem. And we know it’s the wrong problem because a different industry — operating in a far less forgiving environment — already solved the right one.
The tell from 30,000 feet
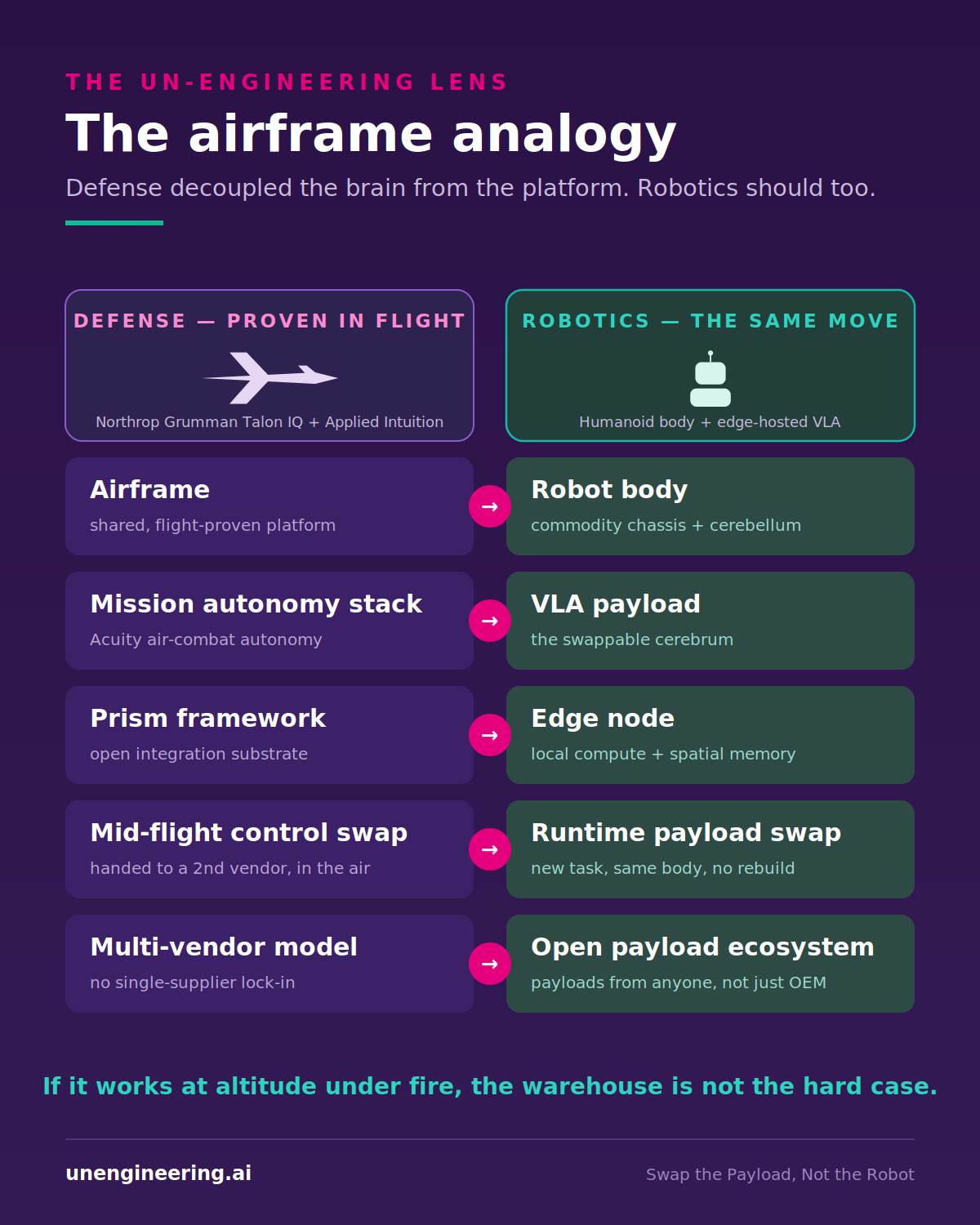
On April 16, 2026, in Mojave, Applied Intuition and Northrop Grumman flew something quietly radical. Applied’s Acuity air-combat autonomy wasn’t strapped on as a standalone box. It was embedded directly inside Northrop Grumman’s Prism mission-autonomy framework, where it commanded mission-critical maneuvers — and then, in the same flight, handed control to a second ecosystem partner’s autonomy stack.
Read that again. Mid-flight. In the air. They swapped the brain and kept the airframe.
The point of the demonstration wasn’t a single clever stack. It was the architecture: an open, modular, multi-vendor model where different autonomy “brains” run on a shared, flight-proven platform without weeks of re-integration. The airframe is the constant. The intelligence is the variable. And the variable is swappable — at runtime, in the most safety-critical operating domain humans have ever built machines for.
Defense did not arrive at this by accident. It arrived because the economics of the alternative are ruinous. You cannot afford a new airframe for every mission profile, every sensor package, every software vendor. So you decouple. The platform becomes a commodity you amortize; the mission autonomy becomes a payload you swap.
Now look back at the humanoid race. Every one of those robots welded its intelligence to its body. Which means every one of them is an airframe you can only ever fly one mission.
The split was right. The address was wrong.
Here’s the un-engineering move, and it’s almost embarrassingly simple once defense hands you the template.
Jaka’s cerebrum/cerebellum split is correct — it just stopped one step short. The two halves of the brain don’t only have different functions. They have different physics.
The cerebellum — balance, reflexes, collision reaction, joint-level control — genuinely needs to be on the body. It runs on millisecond determinism. It must keep working if every network in the building dies. This is non-negotiable, and it’s exactly where a local real-time controller belongs. In the Four-Layer Redundancy model, this is the floor that never depends on anything it can’t physically touch.
The cerebrum — perception, scene understanding, task planning, the VLA model that turns “tidy this room” into a sequence of grasps — has completely different physics. It is latency-tolerant, compute-hungry, and improves constantly. Welding it to the chassis is the one thing you should never do, because it’s the part you most want to swap, share, and upgrade.
So you disaggregate. Cerebellum stays bolted to the body. Cerebrum floats to the edge — not the cloud, the edge: the local on-premises compute node sitting on the same private 5G or Wi-Fi 6E network as the robot, single-digit milliseconds away. This is the SRAL architecture I’ve argued for repeatedly: the thin robot, the network-centric brain, the body as a terminal rather than a mainframe.
And the moment the cerebrum is off the body, three capabilities appear that are flatly impossible when the brain is welded on.

1. The body becomes a multi-payload platform
This is the direct translation of the Talon IQ lesson.
A warehouse humanoid spends the morning running a bin-picking VLA. At noon you swap the payload — same body, same network, new cerebrum — and it runs an inventory-audit model that reads shelf labels and reconciles counts. In the evening it loads a patrol-and-anomaly model and walks the floor as a security asset.
You did not buy three robots. You bought one airframe and three payloads.
The welded dual-brain can’t do this in any economically real way. Its intelligence is a fixed function set at manufacture, depreciating from the day it ships. The disaggregated body is a platform whose capabilities expand every time someone writes a new payload — including payloads from vendors who never touched the hardware. That is the multi-vendor part of the defense model, and it’s the part incumbents will resist hardest, because it commoditizes the thing they most want to lock you into.
2. Spatial memory becomes a shared substrate, not a silo
Here’s the question nobody building a welded brain wants to answer: where does the robot’s memory of the world live, and what happens to it?
On a welded brain, spatial memory is trapped. The map a robot builds of your facility lives and dies inside that one unit. Swap the robot, lose the map. Run ten robots in the same building, get ten disconnected world models that never learn from one another.
Put the cerebrum on the edge and the geometry inverts. Spatial persistent memory lives at the edge node, which means it survives across payload swaps — change the VLA, keep the map — and it’s shared across robots — robot B walks into a building robot A already mapped and inherits the entire world model on arrival. (I wrote about the building blocks for this when I covered OpenClaw and the peaq spatial-memory SDK; disaggregation is what turns those primitives into fleet-level leverage.)
This is the data flywheel in its most literal form. Every robot-hour enriches a shared spatial substrate that every payload, present and future, reads from. The welded-brain fleet gets linearly more data and learns nothing collectively. The disaggregated fleet compounds.

3. Shadow Mode stops being a luxury and becomes free
This is the one that should make any operations leader sit up.
How do you safely roll out a new VLA model to a fleet of robots doing real work? You don’t flip a switch and hope. You run the candidate model in Shadow Mode: it sees the same perception stream as the live model, computes what it would do, and logs it — but it never commands the body. You compare its decisions against the production model on real operational data, and only when it clears your gate do you promote it. This is the heart of SRR Certification-as-a-Service.
On a welded dual-brain, Shadow Mode is a fantasy. Running a second VLA in parallel means a second inference stack on the robot — doubling onboard compute, power draw, and thermal load on a platform already straining to fit one brain. Nobody is putting two Jetson Thors on a humanoid to validate an upgrade.
On the edge, Shadow Mode costs nothing extra on the robot — not a gram, not a watt. You spin up the candidate cerebrum as a parallel process on edge compute you already own. Continuous validation becomes the default, not the exception. Disaggregation doesn’t just enable safe deployment; it makes the safe path the cheap path — which is the only way safety ever actually wins.

“But the network drops”
Good. Let’s have the honest argument, because the objections are real and the orthodoxy isn’t stupid — it’s just incomplete.
The network drops. Yes. Which is precisely why the cerebellum never left the body. Disaggregation is not “everything in the cloud” — that’s the strawman version, and it deserves to die. It’s a deliberate split along the latency seam. When the link degrades, the robot doesn’t fall over; it falls back — to safe local autonomy governed by the on-body controller, exactly as the Four-Layer Redundancy model specifies. Graceful degradation, not catastrophic failure. A robot that freezes safely on network loss is a solved problem. A robot that can never improve because its brain is cast in aluminum is not.
Bandwidth and latency for VLA inference. This is exactly why edge is not cloud. You are not shipping raw 4K sensor streams to a hyperscaler region 80 milliseconds away. The cerebrum runs on a local edge node on the same private network, single-digit milliseconds from the body. The bandwidth exists today; private-5G and Wi-Fi 6E deployments are already provisioned for this profile.
Doesn’t Jetson Thor just solve this onboard? It solves compute. It does not solve economics, and it cannot solve flexibility. Onboard compute scales linearly with fleet size — every robot pays full freight for its own data center, most of it idle most of the time. Edge compute amortizes across the fleet. And no amount of onboard silicon lets you swap payloads, share spatial memory, or run Shadow Mode for free. Thor is an extraordinary chip aimed at a question we should stop asking.
The real lock-in
Strip it all the way down and the argument is about where the value — and the lock-in — lives.
The welded dual-brain makes every robot a depreciating, single-purpose capital asset. Its intelligence ages in place. Its memory is a silo. Its upgrade path is a forklift. That’s CapEx that gets worse every quarter.
The disaggregated architecture makes the body a commodity platform and the intelligence a swappable, continuously improving, fleet-shared service. The expensive thing was never the chassis. The expensive thing is being married to one brain.
Defense figured this out at altitude, under fire, where being wrong is fatal and a new airframe per mission is unthinkable. They decoupled the mission from the platform and proved you can swap the brain mid-flight. Robotics is staring at the same lesson on the ground, in a far gentler operating environment, and reaching for the opposite answer.
The humanoid race is asking how to put a bigger brain on the robot. The better question — the one that compounds — is how to take the brain off it.
Swap the payload. Not the robot.
The Un-Engineering Lens is published at unengineering.ai. — Sources: Jaka Robotics (Pi humanoid); NVIDIA Isaac GR00T open humanoid reference design (Unitree H2, Jetson AGX Thor); Vin Robotics (VRH3); Applied Intuition / Northrop Grumman Talon IQ flight test, Mojave, April 16, 2026.



