Advanced Driver Distraction Systems
20 years of living with ADAS, and the feedback loop that was never built
A first-principles engineering critique of the architecture behind every false bing, phantom brake, and nuisance lane-keeping intervention you have ever experienced — and the single OEM that built it differently.
Last month I quietly passed a milestone I had not consciously tracked: twenty years of living with Advanced Driver Assistance Systems. My first ADAS-equipped car was the then brand-new Audi Q7 4.2 TDI in 2006, fitted with what felt at the time like science-fiction: single-radar Adaptive Cruise Control and rear-radar Blind Spot Assist, both arriving for the first time in a production Audi. Twenty years and roughly a dozen brands later — sitting today behind the wheel of a 2025 GMC Hummer EV with MotorTrend’s Best Hands-Free Tech of 2025 on board — I can tell you with the confidence of two decades of lived data:
“I have had exactly one good ADAS experience in twenty years. One.”
That is not a complaint. It is a clue. And this week’s Autocar editorial, in which Euro NCAP’s ADAS technical manager Adriano Palao admits that almost a quarter of UK drivers find their ADAS “distracting, irritating or intrusive” and turn them off the moment regulations let them, is the same clue arriving from the other direction. So allow me a small editorial intervention. From this article forward, when I write ADAS I am not referring to Advanced Driver Assistance Systems. I am referring to Advanced Driver Distraction Systems. Because that is what almost all of them have been — for me, for the 82% of UK drivers Thatcham surveyed, and for every journalist who is now being briefed on “the fastest way to turn the systems off” before they get in the car.
Wrong question, right question
The framing in this week’s Autocar piece, echoed almost word-for-word by Euro NCAP itself, is that ADAS need to become “smarter and more useful” and to “adapt to individual drivers.” Palao calls it a “fundamental turning point.” The industry nods. OEMs promise better algorithms. Everyone gets back to work.
I would like to suggest, gently, that this is the wrong question.
|
WRONG QUESTION How do we make ADAS smarter
and more useful for individual drivers? |
|
RIGHT QUESTION Why, after 20 years and
billions in R&D, are the cars on our roads architecturally incapable of
learning from the millions of false events they generate every single day? |
This distinction is not academic. It is the difference between making a one-way pipeline a bit faster and making the pipeline bidirectional. Most of what Euro NCAP wants — driver-adaptive lane keeping, false-positive suppression, calibrated emergency braking — is impossible without a feedback loop the industry has spent two decades not building. You cannot tune a system you cannot observe in the field. And almost no OEM today is observing their own ADAS in the field.
The architecture problem nobody names
Strip away the marketing and any production ADAS is roughly three components arranged in a straight line:
→ A sensor stack — camera, radar, sometimes lidar or ultrasonic — wired into a dedicated ECU.
→ A perception-and-control function running on that ECU, usually deterministic rule-based code with some classical computer vision and, increasingly, lightweight ML.
→ An actuator command path — to brakes, steering torque, throttle — and a Human-Machine Interface line to the cluster or infotainment for the bings and bongs.
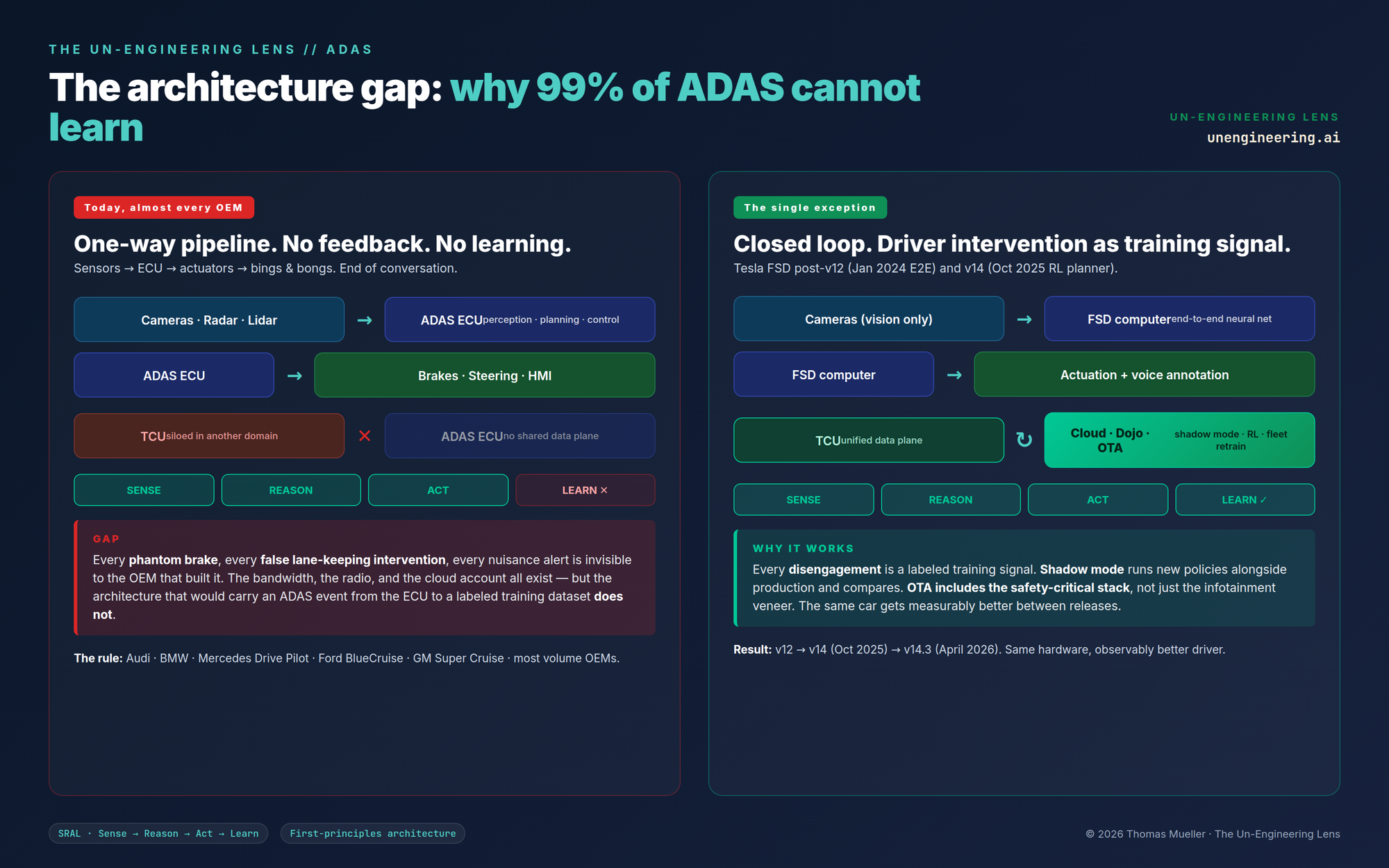
Notice what is missing from that diagram. There is no return path. The ECU emits commands and warnings and that is the end of its conversation. No driver feedback. No labeled false-positive log. No event-level telemetry leaving the car. In the overwhelming majority of vehicles I have driven over twenty years, when the lane-keeping system yanks the wheel because it confused a tar repair line for a lane marker, that event is not recorded, not reported, not seen by anyone except me — the irritated, briefly endangered driver who then turns the system off.
Yes, your car has a Telematic Control Unit. No, it isn’t helping.
Every modern car ships with a Telematic Control Unit — a TCU — capable of cellular connectivity, OTA updates, and cloud uplink. It is in the BMW that pings the dealer when oil life drops. It is in the Mercedes that lets you preheat the cabin from your phone. It is in the Hummer EV that sells me a $49.99-per-month Super Cruise subscription. The TCU is there. It is paid for. It is connected.
And it is, in almost all current platforms, architecturally siloed from the ADAS ECU. In most production E/E architectures, the ADAS ECU is wired to the infotainment domain controller for HMI purposes — driving cluster icons and audio chimes — and that is the limit of its outward connection. The TCU sits in a separate domain, connected to the gateway for diagnostics and remote services, but the data plane was never designed to carry per-event ADAS telemetry back to engineering. The bandwidth exists. The radio exists. The cloud accounts exist. The architecture that would route a phantom-braking event from the radar fusion ECU, through the gateway, out through the TCU, into a labeled training dataset at the OEM does not exist. Not at scale. Not for most OEMs.
The hardware is disaggregated. The data is fragmented. The feedback loop was never an architectural requirement.
Sense, Reason, Act — and almost never Learn
For years I have used a simple four-step model to evaluate any embodied AI system: Sense, Reason, Act, Learn. The first three are obvious — perceive the world, decide what to do, do it. The fourth is the one that separates a useful Physical AI system from an expensive distraction generator. Learn means: the system, in the field, at fleet scale, takes the consequences of its own actions as training signal and gets measurably better between releases.
Plot today’s ADAS landscape on that four-step model and the picture is brutal:
→ Basic L1 ADAS — AEB, BSM, basic ACC. Sense → Act. No Reason, no Learn. The system reacts to a threshold; the engineer who set the threshold last year does not learn that it fires on a flock of starlings in your village.
→ Mid-tier L2 ADAS — lane keeping, Highway Assist, Mercedes Drive Pilot (in its very narrow ODD). Sense → Reason → Act, often with HD map priors. Still no Learn. Map updates are scheduled; perception drift is invisible.
→ GM Super Cruise on the Hummer EV. Sense → Reason → Act, with the Reason step heavily map-dependent on GM’s pre-mapped Super Cruise corridors. Still no Learn. There is no published roadmap, no shadow mode I can observe as a driver, and certainly no mechanism by which my eight disengagements on a 30-mile stretch of I-880 last month make tomorrow’s Super Cruise any better.
→ Tesla FSD post-v12 (January 2024, end-to-end neural net) and especially v14 (rolling out from October 2025, reinforcement learning on the planner). Sense → Reason → Act → Learn. Every disengagement, every driver intervention, every shadow-mode comparison between the new policy and the old one is a labeled training signal flowing back to the data flywheel. Between v12.3 and v14.3 I watched the same car — the same hardware — become a measurably better driver, on the same routes, over a period of months.
This is not a Tesla advertisement. I have plenty to say about Tesla’s execution, supervision model, and marketing. But on the single architectural question that matters here — does this system have a fourth step? — Tesla’s FSD is the only ADAS I have used in twenty years that does. That is what makes it the exception, and the rest of the industry the rule.
Twenty years of evidence, one brand at a time
Let me ground this in lived data. Across two decades and roughly a dozen OEMs, four pieces of evidence stand out.
2006, Audi Q7 4.2 TDI — the elegant baseline
Single-radar ACC, rear-radar BSM. For its day, futuristic. The radar was Bosch. The ECU was a discrete box on the CAN bus. There was no cellular connection, no OTA, no return path. I drove it for years and Audi never knew which of its false-positive warnings I had ignored. The architecture, twenty years later, has barely changed.
2010s — phantom braking on the Autobahn at 130 km/h
Multiple cars, multiple brands, multiple occasions. Cruising on a clear, dry German Autobahn at 130 km/h, the car — unprovoked, with no traffic in front — slams the brakes. ABS engages. The car behind takes evasive action. This is a life-threatening failure mode. In none of those vehicles was I ever asked, after the event, to confirm whether the activation was warranted. The car had cellular connectivity. The car had a service portal. The car had my phone number. Nobody asked. The events left no trace beyond my heart rate.
2024 — Tesla FSD v12 in the US, the single exception
The v12 release in January 2024 was the architectural break: Tesla replaced 300,000 lines of hand-written C++ planning code with an end-to-end neural network trained on fleet video. From that release onward, the car got noticeably better between updates I could see on the same commute. Disengagements I made in March 2024 became cleaner in April. Voice notes I left on disengagement — “FSD wanted to take the unprotected left, I didn’t feel comfortable” — became training signal. v14, rolling out from October 2025 with reinforcement learning on the planner, extended that further. I paid $99 a month, willingly, because the product visibly improved. That is the only ADAS in twenty years I can say that about.
2025, GMC Hummer EV with Super Cruise — the cautionary tale
MotorTrend named Super Cruise Best Hands-Free Tech of 2025. It is, in narrow ODD on its pre-mapped corridors, a competent lane-keeper. It is also, in my honest experience driving thousands of miles on Super Cruise-mapped US Interstates, jerky in transitions, fundamentally confused by merge geometry, and prone to disengage every 30 seconds when lane markings get genuinely interesting. There is no published software roadmap. There is no fleet shadow mode I can observe. There is no driver-annotation channel. And after the three years of OnStar One are up, GM would like $49.99 per month, indefinitely, for an L2+ system that cannot reliably handle a clover-leaf interchange. Compared to what Tesla delivered for $99 — a system that demonstrably improves every quarter — the Super Cruise proposition is, in my view, indefensible. Nobody should pay this for a product with no learning architecture and no published trajectory.
What the industry still has not built
Pull the four pieces of evidence together and the pattern is unambiguous. The problem is not perception. The problem is not compute. The problem is not even regulation. The problem is that no Western volume OEM outside Tesla has built the architecture that would let their ADAS get better in the field. This is what is missing:
|
GAP ANALYSIS — what 20 years of
ADAS still does not include |
|
→ A
unified Telematic Data Plane that connects ADAS ECUs, sensor fusion outputs,
and OTA — not the siloed gateway-to-TCU pipe most OEMs ship today. → Driver
intervention as a first-class labeled training signal. Every disengagement,
every manual override, every “nope” should leave the vehicle as labeled data. → Voice
or UI annotation for false events. The driver knows why the system was wrong.
The system should ask, briefly, once. → Shadow
mode at fleet scale — the new policy runs silently alongside the production
policy and reports back where it would have behaved differently. → A
safety-critical OTA stack that can update ADAS firmware itself, not just the
infotainment veneer around it. → Mixed-criticality
compute that lets ASIL B/D safety functions coexist with best-effort
microservices on the same SoC, without compromise on either side. → Network-centric
inference offload — the 5G Advanced / 6G edge as a first-class scheduling
target, not an afterthought wired to the head unit. |
The disaggregation thesis, applied
Long-time readers of The Un-Engineering Lens will recognise the underlying pattern. I have argued for some time that the future of Physical AI sits with thin, disaggregated stacks — and against the monolithic, vertically integrated ECU box. ADAS today, paradoxically, is the worst of both worlds. The hardware is already disaggregated: a discrete radar ECU, a discrete camera ECU, a discrete TCU, a discrete infotainment SoC, a discrete gateway. But the data plane is fragmented across those domains, and the architectural backbone that would let them exchange events, learn from each other, and report back to engineering simply was never specified.
You cannot tune a system you cannot observe. And you cannot observe a system whose own architecture was designed to keep its events trapped inside a single ECU.
This is why Euro NCAP’s perfectly reasonable wish list — driver-adaptive ADAS, false-positive suppression, calibrated braking, monitoring systems that distinguish legitimate driver activity from distraction — cannot be delivered by the OEMs currently selling these cars. Not because their engineers are not capable. Because the platform was not designed to support it. Adaptiveness without feedback is performance theatre. The fix is architectural, not behavioural.
Right intent, wrong diagnosis
I want to be careful here. Adriano Palao at Euro NCAP is reading the symptoms accurately. Drivers do not trust the systems. Lane keeping does fight the driver. Emergency braking does fire on phantoms. Drivers do turn the systems off the moment the law lets them. Palao’s instinct that something fundamental must change is correct. James Attwood’s editorial that journalists are being briefed on how to disable ADAS before driving a press car is correct. The Thatcham survey that found nearly a quarter of UK drivers regard ADAS as intrusive or distracting is correct.
The diagnosis that follows from that — “make the systems smarter and more adaptive” — is half right. Smarter helps. Adaptive helps. But neither is achievable without the feedback channel none of these systems were built with. The right regulatory ask is not better algorithms; it is mandated architectural reform of the data plane. If Euro NCAP’s 2026 protocols want to do something genuinely useful, they will start measuring whether an OEM’s ADAS architecture is capable of learning from its own field events — and rewarding the ones that can.
The signature line, slightly adapted
Regular readers know the one I usually close on: if your autonomy stack works in Bengaluru traffic, it works anywhere. For ADAS the same test applies, scaled down. If your lane keeping survives a UK B-road in March drizzle without yanking the wheel at every tar repair; if your AEB does not fire on Autobahn bridge shadows at 130 km/h; if your hands-free system does not disengage every thirty seconds at a US Interstate merge — then, and only then, do you have something worth not turning off. Almost nothing on the market today clears that bar. One car does. That car has a fourth step in its loop.
Next in the arc, I will look at how the upcoming ISO 25785-1 functional safety standard for humanoid robotics applies many of these same lessons — mixed-criticality, learning systems in the field, mandated feedback channels — to a domain where the stakes are arguably higher and the regulatory canvas is still blank. ADAS got twenty years to ship a feedback loop and largely did not. Humanoids will not have that long.



